
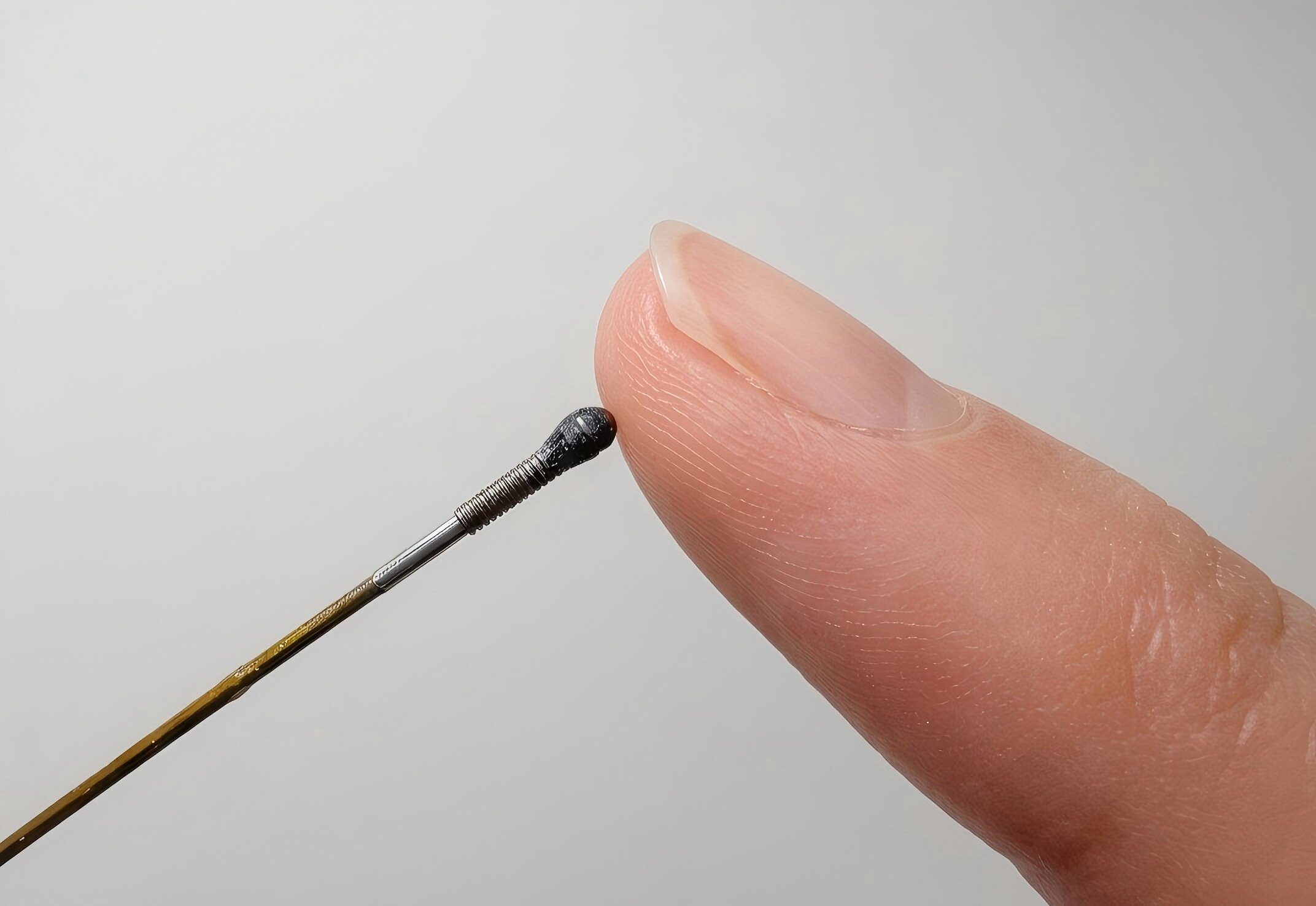
Um sensor do tamanho de um grão de arroz poderia dar aos robôs um toque delicado e evitar que eles quebrem coisas.
Os robôs são incrivelmente precisos, mas a delicadeza nem sempre é o seu forte. Uma máquina capaz de construir um carro com precisão quase perfeita ainda pode aplicar pressão excessiva ao trabalhar em locais onde até o menor erro é crucial, como dentro de um olho humano ou durante uma cirurgia delicada. É por isso que pesquisadores da Universidade Jiao Tong de Xangai estão desenvolvendo um novo tipo de sensor de força que poderá ajudar os robôs a "sentirem" com mais precisão o que estão tocando.
O sensor é minúsculo, aproximadamente do tamanho de um grão de arroz, com apenas 1,7 milímetros de largura, o que o torna pequeno o suficiente para caber dentro de instrumentos cirúrgicos avançados. O que o torna especialmente interessante é que ele não depende de eletrônica tradicional. Em vez disso, usa luz para medir a força em todas as direções, incluindo pressão, movimentos de deslizamento e torção. Veja como funciona: na ponta de uma fibra óptica, há um material macio que muda ligeiramente de forma ao entrar em contato com algo. Essa pequena deformação altera a maneira como a luz se propaga pelo sensor. O padrão de luz alterado é então enviado por fibras ópticas para uma câmera, que o captura como uma imagem. Os pesquisadores usam um modelo de aprendizado de máquina para estudar esses padrões de luz e traduzi-los em leituras de força precisas. Em termos simples, o sistema aprende a "ler" o toque apenas por meio da luz, sem a necessidade de uma série de fios ou múltiplos sensores separados compactados em um espaço tão pequeno.
Por que os robôs precisam sentir, e não apenas ver?
A tecnologia moderna de imagem cirúrgica já é incrivelmente avançada. Os cirurgiões hoje conseguem visualizar o interior do corpo humano com uma clareza impressionante. Mas uma dificuldade que ainda enfrentam, especialmente durante procedimentos minimamente invasivos, é a de sentir o que seus instrumentos estão tocando. Um cirurgião pode visualizar a área claramente em uma tela, mas a distinção entre tecido saudável e algo problemático muitas vezes depende mais da experiência e do instinto do que da percepção tátil do próprio instrumento.
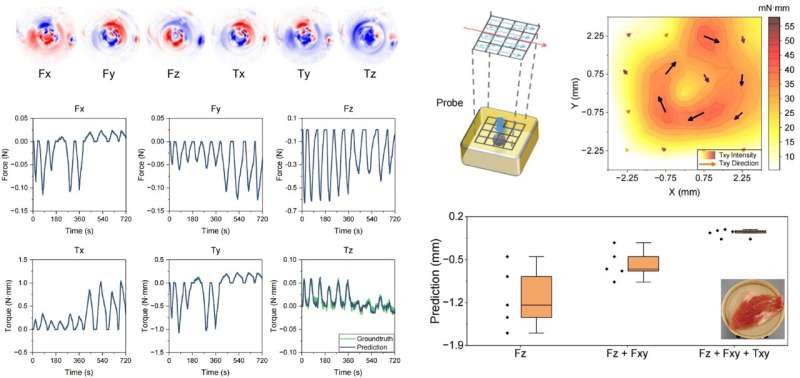
Esse é exatamente o problema que este novo sensor está tentando resolver. Durante os testes, os pesquisadores o utilizaram em um bloco de gelatina macia com uma pequena esfera rígida escondida embaixo, simulando um tumor dentro do tecido humano. O sensor detectou o objeto escondido ao perceber as diferenças de rigidez à medida que se movia sobre a superfície. Em cirurgias robóticas, onde os médicos operam em espaços extremamente confinados e nem sempre podem contar com o toque direto, esse tipo de feedback tátil poderia tornar os procedimentos mais seguros, precisos e muito menos dependentes de palpites.
Ainda há trabalho a fazer antes que isso chegue à sala de cirurgia.
No momento, esses resultados ainda comprovam que a ideia funciona, e não representam uma descoberta médica definitiva. Os próprios pesquisadores admitem que ainda há muito a ser feito. Construir sensores tão pequenos com qualidade consistente em larga escala é muito mais difícil do que criar uma única versão funcional em laboratório. O processo de instalação também precisa ser simplificado e se tornar mais confiável antes que possa ser usado de forma viável em hospitais. Além disso, o sensor ainda não passou pelos testes de estresse de longa duração necessários para que os médicos confiem neles durante procedimentos reais.
Ainda assim, a ideia central por trás da tecnologia parece genuinamente promissora. Em vez de depender de múltiplos sensores complexos, o sistema utiliza uma configuração muito mais simples, baseada em um único canal óptico e uma câmera. Esse tipo de design mais simples geralmente facilita o aprimoramento e a escalabilidade das tecnologias ao longo do tempo, à medida que a engenharia amadurece. A equipe agora está trabalhando na integração do sensor em instrumentos cirúrgicos robóticos reais e testando-o em ambientes mais próximos de salas de cirurgia reais. E embora um sensor do tamanho de um grão de arroz que consegue "sentir" possa parecer uma pequena inovação no papel, ele pode se tornar incrivelmente importante para cirurgiões que guiam instrumentos robóticos por espaços menores que uma unha.
