
Um cão robô aprende a andar de forma independente em 1 hora
Animais recém-nascidos na natureza devem aprender a andar rapidamente para evitar predadores . Além dos reflexos inatos da medula espinhal para ajudar o animal a evitar cair durante suas tentativas iniciais, eles tendem a aprender de forma relativamente rápida. No entanto, os detalhes de como isso acontece ainda não são bem compreendidos . Então, por que não construir um robô de quatro patas para entender melhor os detalhes?
Um robô para entender como os animais aprendem a andar
Foi exatamente isso que os pesquisadores da International Max Planck Research School for Intelligent Systems (IMPRS-IS) fizeram. Para explorar como os animais aprendem a andar, eles construíram um robô de quatro patas do tamanho de um cachorro como parte de um estudo de pesquisa voltado para entender seus detalhes. O resultado foi publicado na revista Nature Machine Intelligence com o título “Learning plastic matching of robot dynamics in closed-loop central pattern generators” .
Chamado de Morti, o robô é composto por quatro pernas biarticulares montadas em um corpo de fibra de carbono. Cada perna tem três segmentos: fêmur, caule e pé. Os segmentos do fêmur e do pé são conectados por uma articulação do joelho com mola para imitar a estrutura biarticular músculo-tendão.
Para os animais, aprender a coordenar precisamente músculos e tendões leva tempo : inicialmente os filhotes dependem muito de reflexos mais básicos, que ajudam o animal nas primeiras tentativas de movimento, enquanto o controle muscular subsequente, o mais avançado, precisa de algum refinamento.
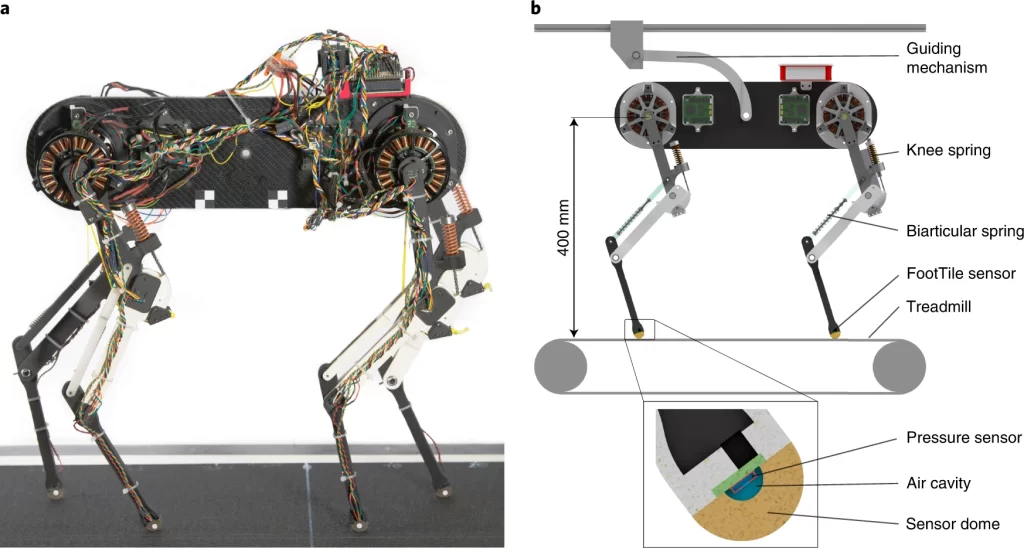
Sob o capô do Morti, encontramos sensores montados nos pés para medir o contato com o solo e vários sensores de posição e velocidade. Liderando tudo isso está um algoritmo de otimização bayesiana que orienta o aprendizado usando informações do sensor do pé juntamente com dados de destino de uma medula espinhal virtualmente modelada, que é executada como um aplicativo de software em um computador.
Várias otimizações foram implementadas sequencialmente no Dead, com desempenho avaliado comparando continuamente as informações enviadas e previstas do sensor e adaptando os padrões de controle do motor em resposta. O robô começou a fazer bom uso do mecanismo da perna após uma duração de cerca de uma hora:
“Nosso robô praticamente 'nasce' sem saber nada sobre a anatomia das pernas ou como elas funcionam (…) ao robô. O computador produz sinais que controlam os motores das pernas e o robô inicialmente caminha e tropeça. Os dados retornam dos sensores para a medula espinhal virtual onde os dados do sensor e do CPG são comparados (…) tropeçando. Alterar a saída do CPG mantendo os reflexos ativos e monitorar o tropeço do robô é parte fundamental do processo de aprendizado "
No futuro, os pesquisadores pretendem estender o CPG levando em consideração o pitch corporal ao gerar trajetórias. Com uma unidade de medida inercial, a inclinação do corpo poderia ser inserida no CPG: na formulação atual, o CPG não assume a inclinação do corpo e conta com a robustez que a elasticidade passiva agrega ao sistema para compensar a inclinação do corpo corpo existente.
Além disso, Morti baseia sua operação em hardware barato (<€ 4.000) com baixo poder computacional (5 W, o exigido por um Raspberry Pi ) e com frequências de controle de 500 Hz (loop de controle) e sensores com frequências mais baixas. da arte de outros controladores de locomoção baseados em modelos mais complexos e que requerem computação de alta largura de banda e altas frequências de controle.
O artigo Um cão robô aprende a andar de forma autônoma em 1 hora foi escrito em: Tech CuE | Engenharia de close-up .
