
Reproduza o movimento do coração com um robô hexapod
Os dispositivos cardíacos estão se tornando cada vez mais complicados e avançados devido ao progresso tecnológico e às regulamentações cada vez mais precisas e rigorosas. Isso é seguido por experimentos cada vez mais refinados que são confrontados com desafios éticos e metódicos inovadores, incluindo a simulação dos movimentos cardíacos. Há muito tempo que procuramos um instrumento que nos permitisse simular o movimento do coração nas suas várias vertentes, de forma a podermos testar melhor os dispositivos implantáveis para o coração. A publicação de Adrian Zurbuchen et al. no qual é descrita uma plataforma robótica que permite simular a trajetória de qualquer ponto do coração com seis graus de liberdade.
Dispositivos cardíacos
O marca-passo cardíaco implantável é um dispositivo implantado sob a pele em pacientes com doenças cardíacas. Monitora continuamente a atividade do coração para intervir em caso de necessidade, restaurando a atividade elétrica do coração. Existem vários dispositivos cardíacos implantáveis que requerem fases de teste com estudos e testes feitos em um tecido cardíaco em movimento.
Normalmente, os métodos de ancoragem ao coração são analisados, negligenciando os fenômenos dinâmicos e o movimento como um todo. O mesmo se aplica aos dispositivos de recuperação de energia que permitem obter energia a partir do movimento. Normalmente, eles são testados em plataformas mecânicas excitadas por sinusóides de alta frequência, mas unidirecionais e longe de um teste in vivo. Essas necessidades geralmente levam a testes em ovelhas e porcos. Embora seja reconhecido que essas abordagens oferecem benefícios éticos significativos, um declínio nos testes em animais é desejável .
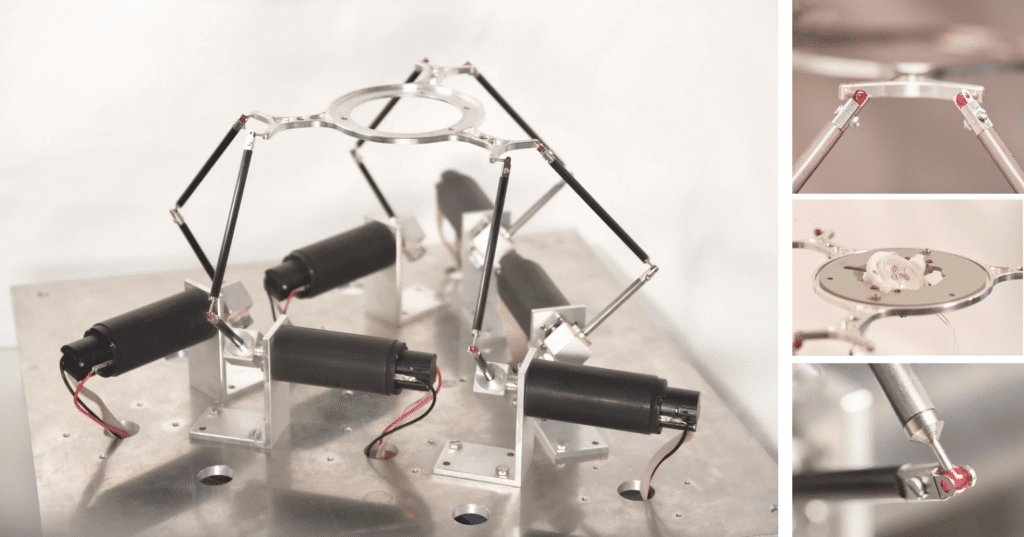
O robô
Consiste em uma plataforma Stewart , ou robô paralelo, controlada por 6 motores com um codificador de 10 bits. O robô usa os 6 braços para mover a plataforma, explorando o trabalho simultâneo dos braços, mesmo que sua posição seja independente um do outro. Eles são conectados às interfaces de movimento universal com um controlador PXI. O controle é realizado por um compensador PID de malha fechada clássico, integrado ao controlador. Em seguida, um software LabVIEW é adicionado, constituindo a interface gráfica e permitindo que você defina os pontos de ajuste.
Seis graus de liberdade são possíveis, ou seja, as três translações ao longo de x, ye z e as três rotações, respectivamente, roll, pitch e yaw. Permite movimentos com aceleração de 20 m / s 2 e ângulo máximo de flexão de 19 °. Tem uma precisão na trajetória e no posicionamento dos pontos desejados inferior a um quarto de milímetro e para a rotação inferior a um quarto de grau. No geral tem uma base de 40 × 40 cm e suporta uma carga máxima de 442 g.

Para mover a plataforma seguindo a trajetória desejada o (t) e atitude φ (t) é necessário definir a posição alvo e a orientação das seis pernas e, portanto, dos atuadores. As articulações são articulações esféricas que permitem que a parte superior da perna gire livremente em uma esfera com a articulação central e o raio dados pelo seu comprimento. Em vez disso, no motor existe uma junta cilíndrica que permite uma rotação apenas em torno do eixo do motor, ou seja, a extremidade da perna só pode estar em uma circunferência dada por seu raio e centrada no eixo de acionamento. Como as extremidades da parte superior e inferior das pernas devem coincidir, a solução é determinada encontrando a interseção das duas trajetórias.
Controlador de loop fechado
A posição do joelho é calculada com a equação do vetor de fechamento: ![]() . Em seguida, vamos calcular a função
. Em seguida, vamos calcular a função ![]() para que o solucionador possa resolvê-lo minimizando a saída (α -> 0). Dos resultados possíveis, apenas a solução S1 será válida. Repetindo o processo para os seis segmentos de acordo com a trajetória e a atitude configurada, obtém-se a descrição do ângulo de rotação ao longo do tempo para todos os motores.
para que o solucionador possa resolvê-lo minimizando a saída (α -> 0). Dos resultados possíveis, apenas a solução S1 será válida. Repetindo o processo para os seis segmentos de acordo com a trajetória e a atitude configurada, obtém-se a descrição do ângulo de rotação ao longo do tempo para todos os motores.
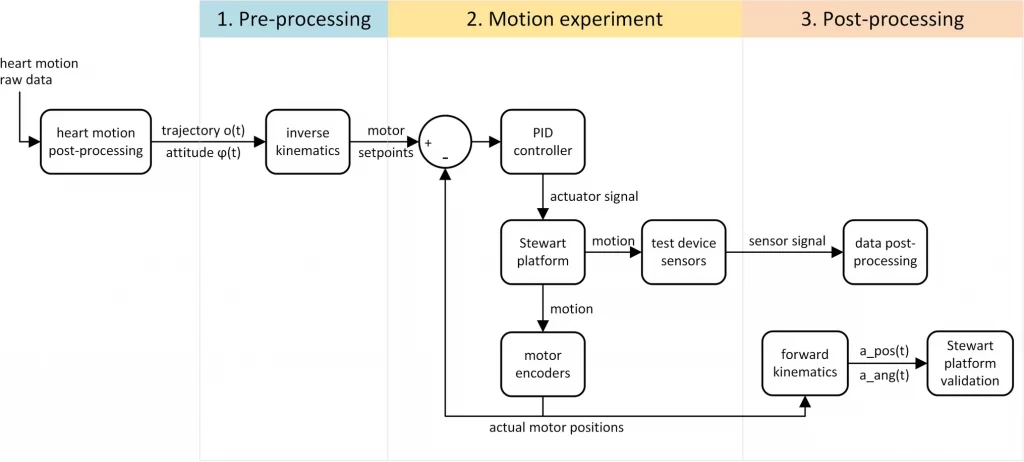
O controlador considera cada entrada fornecida como um ponto fixo da trajetória e, a seguir, procura os melhores valores para o movimento . No entanto, isso envolve alguns problemas de precisão quando a carga a que a plataforma é submetida aumenta e os próprios autores sugerem o uso de mecanismos de compensação mais avançados que também se referem a um modelo mecânico da parede do coração. No entanto, para cargas suficientemente pequenas, as trajetórias são aceitáveis e isso leva à possibilidade de realizar experimentos ex vivo nesta plataforma. Também é sugerido aproveitar os controladores baseados em aprendizado de máquina para aproveitar o fato de que o ciclo cardíaco repete uma trajetória previsível que poderia ser refinada cada vez mais ciclo após ciclo.
Mecânica do coração
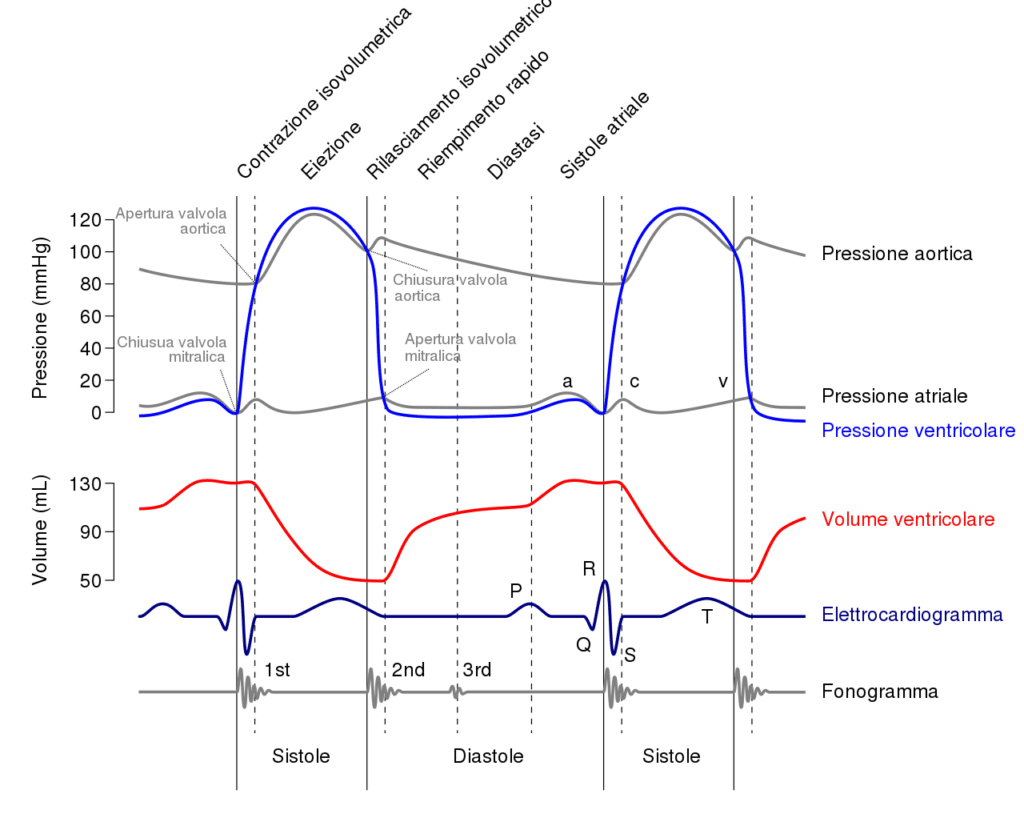
Cada ciclo cardíaco tem duas fases mecânicas principais: diástole e sístole. Na diástole, o músculo cardíaco relaxa, enquanto na sístole ele se contrai. Os eventos são então separados ainda mais, uma vez que os átrios e os ventrículos não o fazem de forma síncrona, mas de forma que garanta a maior eficiência em empurrar o sangue ao longo de toda a árvore circulatória. No geral, o ciclo cardíaco é dividido em quatro fases .
Na contração isovolumétrica, ocorre um aumento da pressão ventricular. Quando esta excede a pressão aórtica, o sangue é injetado na aorta e a fase de ejeção rápida começa. Essa fase é seguida de relaxamento isovulométrico durante o qual os semilunares são fechados e o miocárdio é liberado, permitindo que o sangue volte a encher os átrios. Segue-se então a última fase em que ocorre um rápido enchimento ventricular e finalmente a sístole atrial que permite empurrar todo o sangue dos átrios para os ventrículos. O ciclo então recomeça. A repetição desse ciclo leva a movimentos precisos e repetitivos da estrutura do coração.
Usando dados adquiridos de imagens médicas, é possível reconstruir os movimentos do coração usando os seis motores em um controlador de circuito fechado. Tudo é gerenciado por uma interface gráfica que monitora o funcionamento de cada segmento do robô no acompanhamento dos dados fornecidos. Portanto, é possível reproduzir o movimento do coração humano e de grandes animais com alta precisão e boa reprodutibilidade. Isso certamente será ouvido nas fases de desenvolvimento e teste de dispositivos cardíacos. Além disso, permitirá reduzir os experimentos com animais.
O artigo Reproduzindo o movimento do coração com um robô hexápode vem de Tech CuE | Engenharia de Close-up .
