
Insetos ciborgues, alimentados por células solares orgânicas ultramacias
Os avanços recentes alcançados no campo da eletrônica tiveram importantes repercussões na integração entre máquinas e organismos. Em particular, a referência é aos Ciborgues , mais precisamente os insetos ciborgues, cada vez mais propostos para operações como busca e salvamento no ambiente urbano. Para isso, os dispositivos de coleta de energia montados no corpo são essenciais para expandir a gama de atividades e funcionalidades necessárias.
Para conseguir isso, um grupo de cientistas asiáticos liderados pelo Instituto Riken japonês desenvolveu um ciborgue meio barata e meio robô. Com a praticidade de ser alimentado por energia solar e controlado remotamente sem fios .
A razão para as células solares alimentarem insetos ciborgues
Novos componentes tecnológicos, capazes de se integrar com os organismos, aumentaram a demanda por dispositivos de maior potência. O volume da bateria e os limites de peso para robôs controlados remotamente podem ser superados usando estratégias de carregamento.
Alternativamente, um dispositivo de coleta de energia montado no robô pode estender seu alcance de atividade . Um exemplo promissor são as células de biocombustível que geram energia a partir do próprio corpo do inseto. Até o momento, o maior valor de potência de saída alcançado com células de biocombustível enzimático é de 333 µW.
Mas esse valor não é suficiente para funções avançadas, como controle de locomoção sem fio, que exigem valores de vários miliwatts ou mais. Uma célula solar pode gerar uma potência de 10 mW em cm 2 em condições de luz solar ao ar livre; o valor mais alto graças a esta tecnologia em condições externas.
No entanto, alcançar esses resultados envolve a adoção de estratégias de projeto e integração de células solares em larga escala. Porque os insetos devem manter suas habilidades comportamentais básicas enquanto recebem o poder de operar. Graças a um módulo composto por uma célula solar ultramacia, os pesquisadores criaram insetos ciborgues sem impedimentos às habilidades de movimento .
A combinação de filmes eletrônicos ultrafinos com uma estrutura de interconexão adesiva e não adesiva no abdômen do inseto, permitiu que o inseto se auto-endireitasse. Tudo com uma taxa de sucesso superior a 80% nas várias tentativas realizadas e com uma potência de saída de 17,2 mW fornecida pela célula solar .
Estrutura e movimento do inseto ciborgue
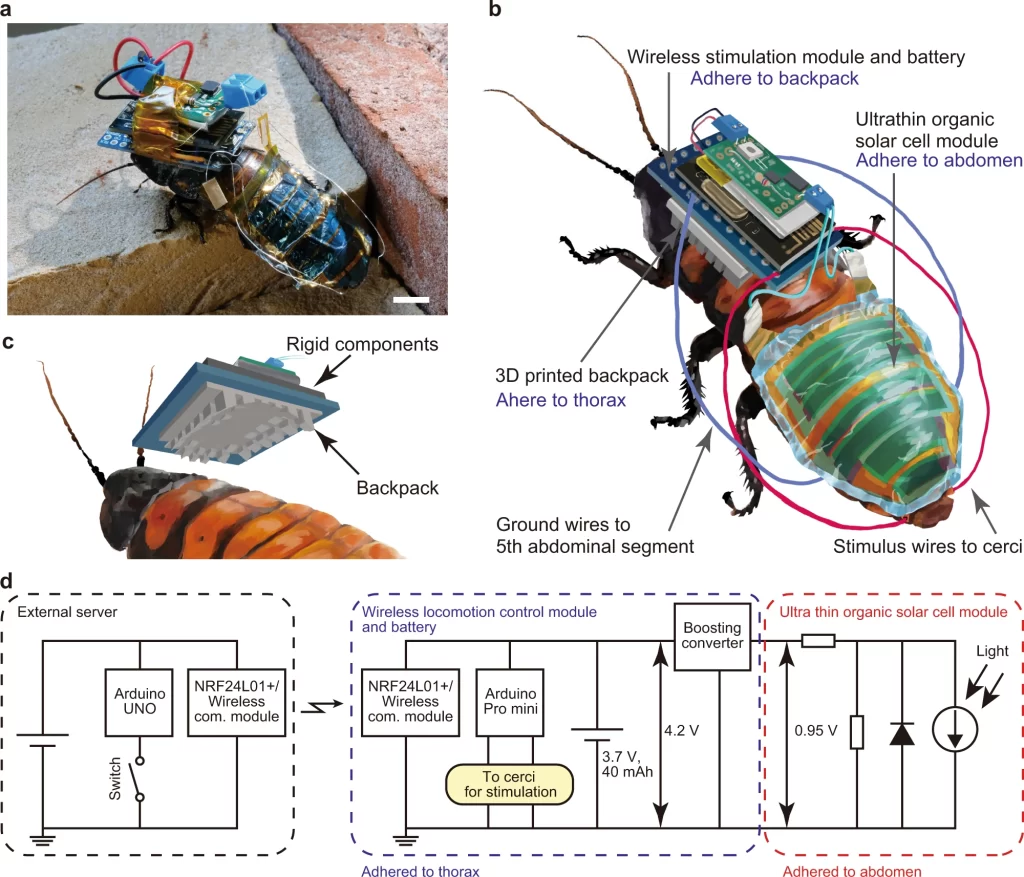
Os cientistas usaram a barata sibilante de Madagascar para este estudo, montando os componentes eletrônicos na parte dorsal do inseto. Graças a uma mochila, especialmente impressa em 3D para se adaptar às curvas do peito , a bateria e os circuitos encontraram um lugar no inseto. A parte abdominal, por outro lado, é tocada pela célula orgânica solar de 4 µm de espessura.
Para controlar o inseto ciborgue, os pesquisadores conectaram o módulo de controle de movimento sem fio no peito ao cerci (Figura 1b). Estes últimos são até mesmo apêndices nos segmentos posteriores do abdome. Uma vez que um estímulo elétrico é aplicado a um apêndice específico, o inseto vira na direção certa. É um servidor externo que envia sinais de controle de movimento via tecnologia sem fio Bluetooth.
O movimento dos insetos ciborgues com o filme ultrafino
A observação seccional do abdome revelou que cada segmento do abdome se sobrepõe parcialmente durante sua deformação. O curso de cada segmento é de até 2,5 mm. Como solução, os pesquisadores usaram a tecnologia combinada de filmes de polímeros ultrafinos e uma estrutura de interconexão adesiva e não adesiva . Tudo isso permitindo a flexão do abdômen (fig. 2a).
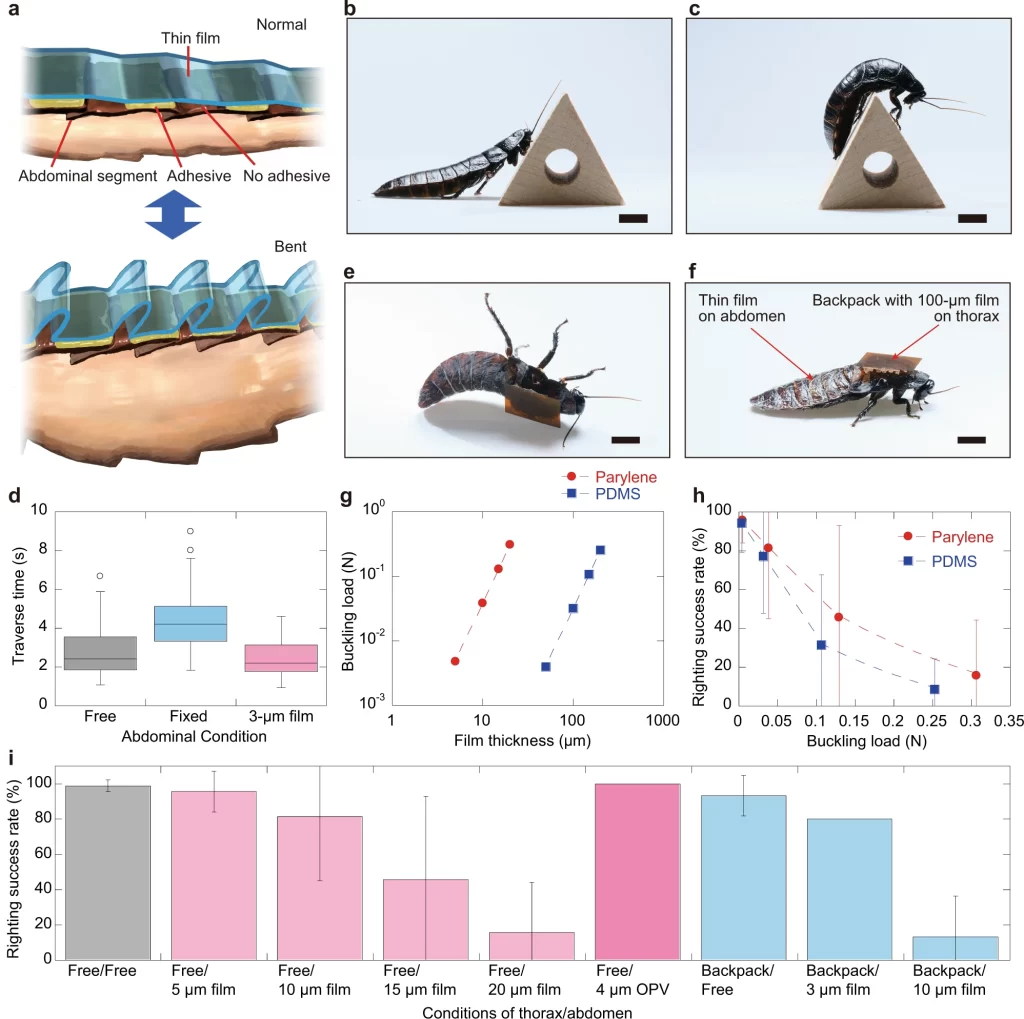
O filme tem uma estrutura oca que adere seletivamente apenas à parte não sobreposta. Essa estrutura de interconexão adesivo-não-adesivo permite espaço para que o filme se dobre para cima à medida que o segmento do abdome se move (Figura 2a).
A eficácia da estratégia de fixação de filmes finos foi quantificada de duas maneiras. Na primeira, medindo o tempo de transposição de um obstáculo, com excelentes resultados após a aplicação do filme de 3 µm. Na segunda, as ferramentas mediram a taxa de sucesso de “auto-ajuste” a partir de uma posição invertida (no solo) do inseto (Figura 2e, f). Neste experimento, filmes finos com espessuras e módulos de elasticidade variados deram resultados diferentes. Mas acima de tudo, os resultados confirmaram a combinação de filmes suficientemente finos com a estrutura de interconexão como ótima. (100% de sucesso com a célula solar de 4 µm) .
Possíveis desenvolvimentos futuros
A equipe de pesquisadores , liderada por Kenjiro Fukuda, tem como próximo objetivo integrar sensores e câmeras. Há também a vontade de estender o uso de Cyborgs em aplicações de monitoramento e resgate para outros insetos também. De fato, como afirmou:
(…) Como a deformação abdominal não é exclusiva das baratas, nossa estratégia também pode ser adaptada a outros insetos, como besouros e talvez até insetos voadores, como cigarras.
Kenjiro Fukuda
O artigo Insetos ciborgues, alimentados por células solares orgânicas ultramacias foi escrito em: Tech CuE | Engenharia de close-up .
