
Da Rússia, o “cérebro artificial” para guiar robôs no meio da multidão
Num futuro não muito distante, não será difícil encontrar grupos de robôs caminhando silenciosamente pelas ruas de nossas cidades, tomando o metrô ou outro transporte público. No entanto, a necessidade de "instruí-los" a se movimentar entre a multidão sem causar danos ao ser humano está se tornando cada vez mais importante. Um grupo de pesquisadores do Departamento de Cibernética da Universidade Nacional de Ciência e Tecnologia MISiS da Rússia conduziu experimentos para tentar reproduzir o mesmo comportamento que as pessoas têm em multidões em uma frota de robôs. O resultado foi ter criado uma rede neural artificial capaz de imitar o cérebro humano em situações semelhantes .
Nosso cérebro é capaz de escolher espontaneamente o melhor caminho
Você já observou o movimento caótico das pessoas no meio da multidão? Certamente terá acontecido a todos, pelo menos uma vez na vida, impactar o caminho de outra pessoa e não saber que caminho seguir quando isso acontecer. Na realidade, isso acontece "por causa" do nosso cérebro. Quando focamos nossa atenção em alguém em particular, tendemos a nos concentrar demais no caminho dessa pessoa. Se, por outro lado, caminharmos abnegadamente, sem dar muitas perdas a outras pessoas, é muito menos provável que isso aconteça. Nosso cérebro, na verdade, usa o chamado "conhecimento intuitivo" para prever inconscientemente todos os movimentos das pessoas na multidão, permitindo-nos escolher o caminho ideal .
Robôs pequenos como um estudo de caso
Os experimentos realizados pelos cientistas da Universidade MISiS envolveram até 55 minúsculos robôs circulares (35 mm de diâmetro) de plástico, impressos com a técnica de impressão 3D. Graças a um circuito elétrico elementar dentro deles, os robôs são capazes de vibrar em uma faixa de frequências entre 50 e 100 Hz. Fornecendo uma fonte de alimentação adequada, eles são capazes de descrever movimentos aleatórios e caóticos dentro de um recipiente de plástico, obrigado às vibrações do motor.
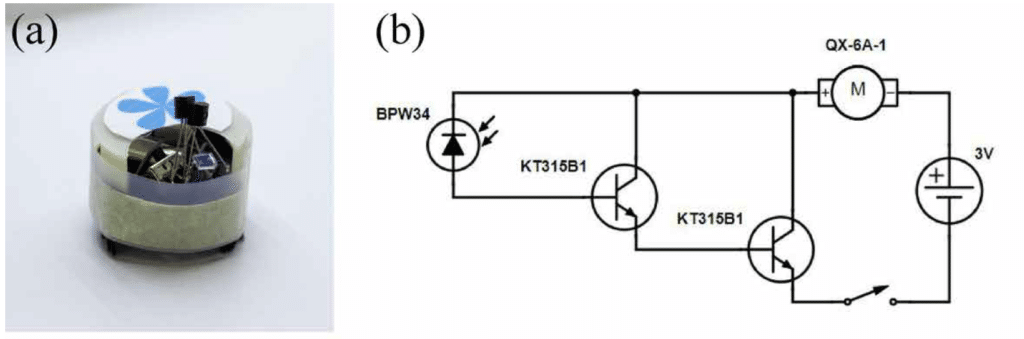
Câmeras para registrar os movimentos dos robôs e treinar a rede neural
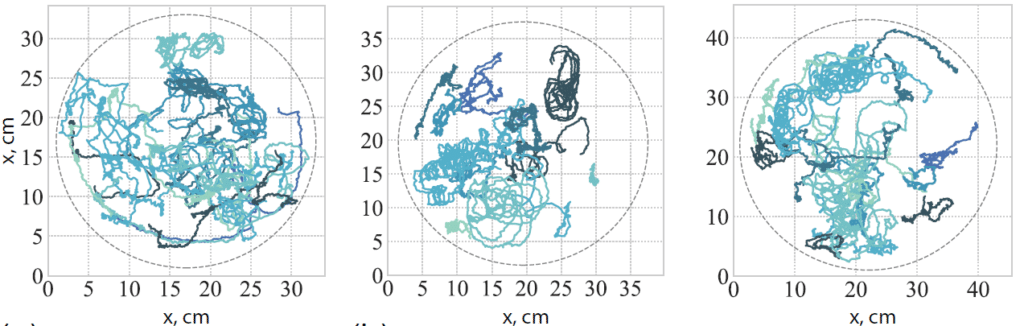
Durante os experimentos, os pesquisadores usaram três recipientes plásticos diferentes com diâmetros variados (20 a 40 cm). Nas três condições de operação, ao variar também o coeficiente de atrito entre os robôs e o fundo do contêiner, uma câmera registrava as trajetórias descritas pelos robôs. Eles foram usados para treinar DeepLabCut , uma rede neural artificial baseada em algoritmos disponibilizados pela OpenCv Library , uma biblioteca de software multiplataforma usada para aplicações de visão computacional em tempo real. O que os cientistas criaram é um verdadeiro "cérebro artificial" capaz de definir as trajetórias e disponibilizá-las a uma frota de robôs, para guiá-los no meio da multidão .

A rede neural desenvolvida permitirá que grupos científicos simplifiquem significativamente o estudo de processos físicos em densos aglomerados de partículas caóticas em movimento e podem ser usados como um produto final. Medir todas as coordenadas e velocidades dos robôs permitirá uma descrição exaustiva dos processos que ocorrem na multidão, incluindo informações sobre as transições de fase e agrupamento de robôs .
Nikita Olekhno, estudante de doutorado
Nikita Olekhno, uma das pesquisadoras da equipe, explicou. Além disso, durante o estudo, também foi analisado o deslocamento médio quadrático de cada robô, partindo da posição inicial até a posição final. Usando diferentes lubrificantes para variar o atrito, verificou-se que para densidades mais baixas os robôs se movem com menos suavidade, enquanto que para valores mais altos são obtidos movimentos mais naturais.
O cérebro artificial pode calcular as trajetórias de robôs na multidão
Os resultados obtidos parecem promissores para permitir que um computador, talvez remotamente, seja capaz de gerenciar os movimentos de robôs no meio da multidão. O mais surpreendente é que uma inteligência artificial pode ser capaz de definir trajetórias "aleatoriamente precisas", assim como nossos cérebros fazem quando caminhamos entre as pessoas. A rede neural artificial, de fato, pode ser usada para criar algoritmos de controle remoto de frotas de drones . Além disso, os cientistas estão otimistas quanto a novas melhorias, graças às quais podem fazer simulações em tempo real da frota que está sendo controlada. Isso levaria à criação de um Digital Twin (ou seja, uma réplica virtual) de todo o sistema. Com isso, será possível até replicar os movimentos dos robôs em tempo real, abrindo caminho para uma nova fronteira de interação entre humanos e máquinas.
O artigo Da Rússia, o “cérebro artificial” para guiar robôs no meio da multidão, vem do Tech CuE | Engenharia de Close-up .
