
Circuitos integrados controlam microrrobôs pela primeira vez
A Cornell University tornou possível o desenvolvimento de micro -robôs com circuitos integrados a bordo para movimento autônomo e sem restrições externas . As informações provenientes dos “cérebros” eletrônicos que compõem os microprocessadores orientam esses robôs autônomos por meio de atuadores mecânicos. E este é justamente o obstáculo fundamental para o desenvolvimento de robôs microscópicos: a integração de sistemas de informação com microatuadores.
Características dos micro-robôs com circuitos integrados
Os pesquisadores conseguiram isso construindo microrobôs autônomos de 100 a 250 micrômetros, alimentados por luz e capazes de andar a 10 micrômetros por segundo. Tudo isso é possível graças à inclusão da eletrônica complementar de semicondutores de óxido metálico (CMOS) .
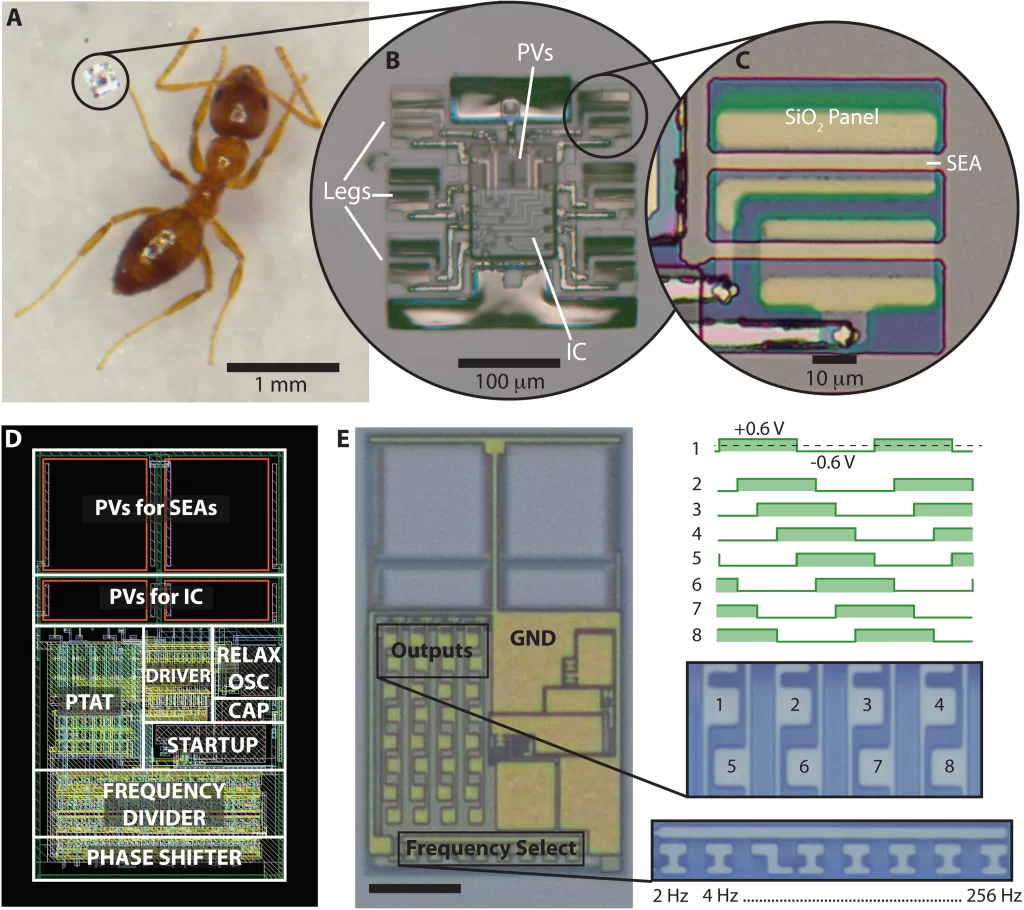
Indistinguível a olho nu, cada dispositivo é menor que a cabeça de uma formiga. Uma visão ampliada revela sua composição em três macroáreas. Em particular, circuitos integrados (ICs) para controle, pernas para caminhar e painéis fotovoltaicos de silício (PV) para alimentar ambos .
O cérebro de cada robô contém mil transistores, bem como uma série de diodos, resistores e capacitores. O circuito CMOS integrado gera um sinal que produz uma série de frequências de onda quadrada fora de fase que, por sua vez, regulam o ritmo do robô . Por fim, este último é o resultado dos atuadores de perna, que são feitos de base de platina (medindo alguns nanômetros).
A principal peculiaridade consiste nos circuitos integrados a bordo chamados ASIC (application-specific IC). Produzidos pela X-FAB Silicon Foundries com um processo de isolamento de 180 nm, eles podem operar com menos de 1 microwatt de potência graças ao PV .
Combine CIs e microatuadores
O processo desenvolvido inclui 13 camadas de fotolitografia, 12 gravuras e 11 depósitos envolvendo 10 materiais diferentes . A partir da eletrônica CMOS recebida da X-FAB, os pesquisadores primeiro gravaram em torno do circuito do robô e depois depositaram as interconexões. Depois o metal para blindar o circuito da luz e por fim modelados os atuadores e painéis rígidos para fazer as pernas.
Uma vez concluídos os robôs e gravados o substrato de silício subjacente, eles os liberaram em uma solução aquosa; tipicamente uma solução salina tamponada com fosfato (pH 7,5). Após a liberação dos robôs, foi possível manipulá-los individualmente com micropipetas.
Tipos de microrrobôs criados com circuitos integrados
Para seus testes, os acadêmicos de Cornell fizeram três tipos de dispositivos . O primeiro, chamado "Purcell-bot", leva o nome do físico E. Purcell por causa do movimento que reflete seu teorema de vieira . O robô atinge a velocidade de 5 µm/s, cerca de dois comprimentos de corpo por minuto. Alimentado por uma intensidade luminosa inferior a 1 kW em m², realiza um ciclo de avanço completo a uma frequência de 1 Hz.
O segundo conceito foi inspirado no movimento das formigas, dando origem ao "antbot", robôs hexápodes. Ele se move a uma velocidade média de cerca de 12 µm/s, cerca de três vezes o comprimento do corpo por minuto. A frequência do ritmo é de quase 2,5 Hz, portanto, pode se mover 5 µm por etapa. Marcha que é comum a muitos insetos, chamada Marcha Alternada de Tripé .
Construir robôs microscópicos com tecnologia CMOS também permite criar o tipo que altera seu comportamento em resposta a estímulos externos . Para demonstrar essa capacidade, os pesquisadores criaram "dogbots" que reagem a comandos simples. Nesse caso, é a luz que orienta esses comandos para dizer ao robô para aumentar sua velocidade, por exemplo.
Coletivamente, o trabalho de Cornell é o início de uma nova "família" de robôs microscópicos com inúmeros projetos de "gênero" permitidos por circuitos integrados. Todos com diferentes “espécies” de estratégias de locomoção. Mas, graças à fotolitografia, os cientistas garantem que podem fazer muitos tipos diferentes de projetos ao mesmo tempo .
Esperanças para aplicações futuras
O principal autor do estudo, um pesquisador de pós-doutorado, disse:
Este resultado permite-nos imaginar robôs microscópicos verdadeiramente complexos e altamente funcionais, com elevado grau de programabilidade, integrados não só com atuadores, mas também com sensores”. Estamos entusiasmados com as aplicações na medicina – algo que pode se mover nos tecidos e identificar células boas e matar as ruins – e remediação ambiental, como se tivéssemos um robô capaz de quebrar poluentes ou detectar um produto químico perigoso e se livrar dele “.
Michael Reynolds, MS '17, Ph.D. '21.
Portanto, embora o conceito seja simples por enquanto, seu trabalho abre caminho para aplicações promissoras em muitos campos.
O artigo ICs pela primeira vez controlando microrrobôs foi escrito em: Tech CuE | Engenharia de close-up .
