
Robôs SWIM da NASA: nadarão e explorarão mundos oceânicos extraterrestres
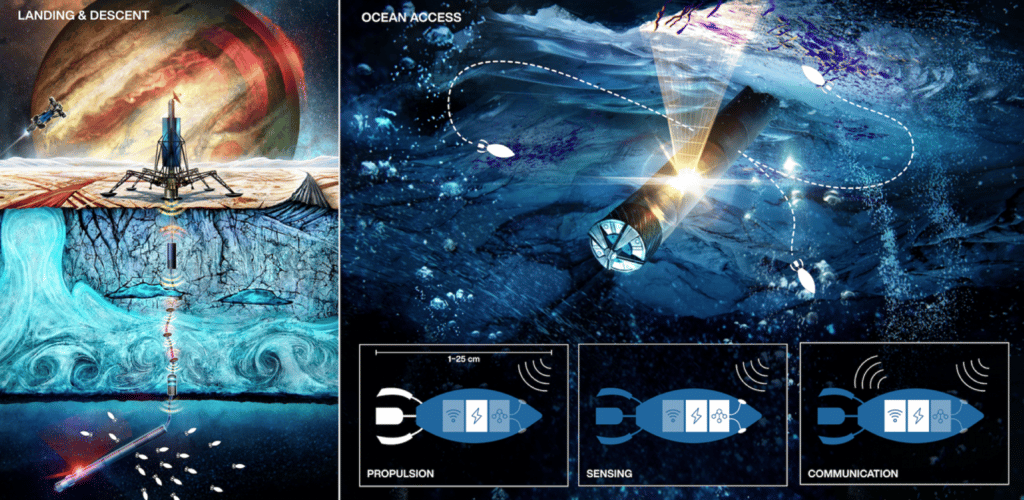
Há algum tempo, o famoso rover Perseverance da NASA coletou amostras do solo marciano para encontrar restos de vida microbiana antiga. Mas Marte não é o único planeta apontado pelos cientistas como candidato à exploração em busca de formas de vida. De notável interesse são também luas do nosso sistema solar, como Encédalo, Europa, Titã, que eles acreditam serem abundantes em água. Então, como podemos investigar essas reservas sob espessas crostas de gelo? A resposta está nos robôs SWIM da NASA, um projeto que visa desenvolver dispositivos que nadarão sob superfícies geladas .
Robô SWIM da NASA, unidade é força
As intenções dos seus promotores seriam reduzir os riscos e melhorar a investigação científica. Na verdade, a verdadeira inovação é a utilização de pequenos dispositivos de natação muito menores do que outros protótipos de robôs para a exploração de oceanos extraterrestres.
Para acessar esses ambientes aquáticos, a NASA está desenvolvendo e amadurecendo numerosos conceitos de missões oceânicas . Isso inclui classes de robôs de perfuração termomecânicos chamados Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) . O SWIM precisará expandir dramaticamente as capacidades das missões robóticas de acesso aos oceanos da SESAME. Aumentarão assim significativamente a probabilidade de detecção de vestígios de habitabilidade, vida e biomarcadores.
Samuel Howell, outro membro do JPL, compara o SWIM ao helicóptero Ingenuity de Marte , companheiro de voo do rover Perseverance. O Ingenuity ampliou o alcance do rover, fornecendo-lhe imagens dos arredores e auxiliando na exploração. Da mesma forma , o conjunto de micro robôs, operando em conjunto, traz benefícios ao módulo principal.
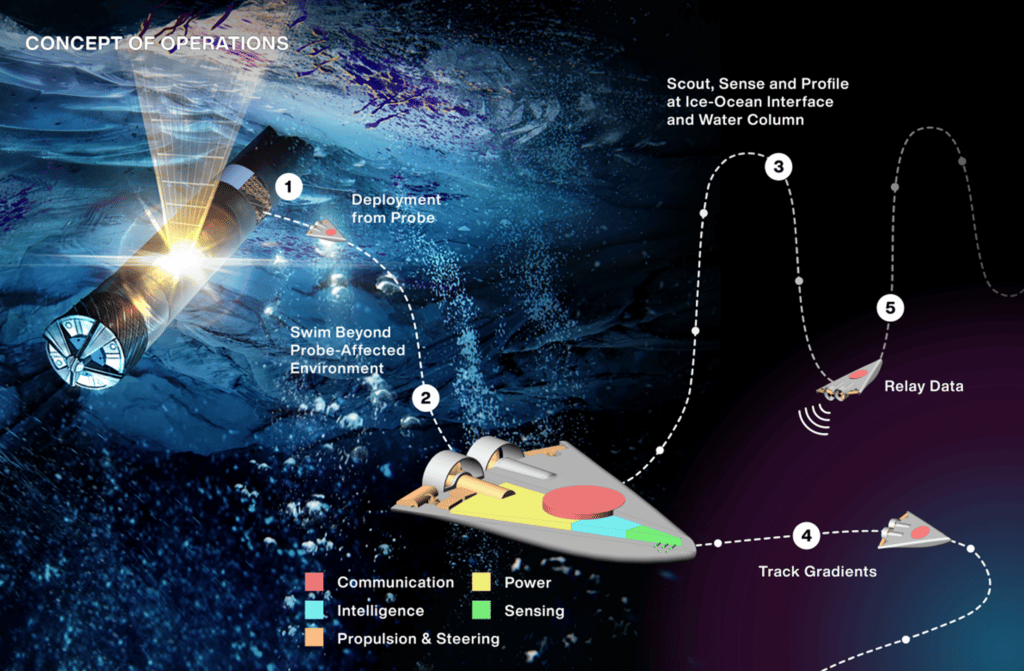
Recursos e operação
O sistema SWIM consiste em microrobôs nadadores impressos em 3D (micronadadores) da ordem de cm. Eles são equipados com sensores MEMS, acionados por atuadores miniaturizados e controlados sem fio por ondas ultrassônicas. Um único robô-mãe SESAME tem mobilidade limitada quando atinge a fronteira do oceano-gelo; é por isso que os micro-nadadores terão que se posicionar individualmente ou em enxame. A vantagem, na verdade, é precisamente esta: o SWIM permite amostrar ativamente a água do oceano além do alcance do robô SESAME .
Cada componente do enxame também possui sensores simples de temperatura, salinidade, acidez e pressão, bem como sensores químicos para biomarcadores. Além disso, eles poderiam “agrupar-se” em comportamentos inspirados em peixes ou pássaros , reduzindo assim erros nos dados através de suas medições sobrepostas.
Outro problema que o SWIM resolve é a coleta segura de dados. A sonda que contém os microrrobôs depende de baterias nucleares quentes para derreter o gelo e, assim, criar um caminho para baixo. Estes criam calor que, no oceano, gera uma bolha térmica que derrete o gelo acima. O que na prática interfere na coleta de dados porque o calor provoca reações que podem alterar a química da água.
O projeto
O conceito, por trás da ideia de Ethan Schaler, é a sigla para “Sensing With Independent Micro-Swimmers” . Engenheiro de robótica do Laboratório de Propulsão a Jato da NASA, sua ideia recebeu US$ 600 mil em financiamento. Isto é feito pelo programa NIAC, que examina projetos através de vários estágios de aprovação.

Na Fase I, os engenheiros avaliaram a viabilidade de operar sem fio a distâncias de vários metros de um robô mãe por meio de 2 tarefas. A capacidade de executar tarefas e fabricar dispositivos adequados para uma missão robótica da classe SESAME da NASA em situações de gelo oceânico. Um estudo comercial sobre o projeto de micronadadores determinou então o projeto e o tamanho apropriados dos robôs. Isto consiste em utilizar instrumentos científicos disponíveis nas distâncias de exploração e nas condições oceânicas esperadas.
Na Fase II, os engenheiros estenderão a viabilidade técnica dos robôs SWIM para missões científicas da NASA para a exploração de oceanos gelados em mundos oceânicos como Europa. Eles farão isso completando as 5 tarefas principais a seguir:
- Projeto, prototipagem e teste do sistema para demonstrar localização e controle para robôs, controle de enxame e detecção de gradiente de sinal.
- Simulações para identificar conceitos de operação e estratégias de exploração de enxames com alta confiabilidade e requisitos mínimos de hardware.
- Desenvolvimento de carga útil de sensor para projetar, fabricar e testar um conjunto de sensores adequados, construídos com sensores COTS e depois fabricados com MEMS.
- Implementação de comunicação para projetar e fabricar nós transdutores ultrassônicos e implementar e testar um protocolo de comunicação bidirecional na água.
- Crie controles para demonstrar e caracterizar a mobilidade na água, estimativa de estado e controle de circuito fechado.
O artigo Robôs NASA SWIM: eles nadarão e explorarão mundos oceânicos extraterrestres foi escrito em: Tech CuE | Engenharia de perto .
