
Do MIT o primeiro drone capaz de evitar obstáculos mesmo em altas velocidades
Nos últimos anos, a navegação rápida de veículos autônomos tem recebido um interesse crescente. Por vários anos, competições autônomas de drones também foram organizadas, nas quais participam milhares de pessoas em todo o mundo. Os algoritmos de última geração em estimativa e controle estão atualmente atingindo um nível de maturidade muito alto. Isso envolve a necessidade de algoritmos de planejamento de trajetória que aproveitem ao máximo as capacidades do veículo, levando em consideração as limitações da dinâmica do veículo, em vez de depender de modelos simplificados. Um drone foi desenvolvido no MIT que evita obstáculos de forma eficiente, mesmo em altas velocidades.
Estudo das restrições de viabilidade no MIT para o drone

Os estudiosos do MIT desenvolveram um algoritmo capaz de obter uma trajetória quadrotor otimizada e dinamicamente viável ao longo do tempo e capaz de ajudar os drones a evitar obstáculos em alta velocidade para evitar colisões . A equipe de pesquisadores acredita que o algoritmo pode ser usado em operações que exigem tempos muito curtos em situações mais complexas como, por exemplo, a busca por sobreviventes de um desastre natural.
Portanto, o conhecimento preciso das restrições de viabilidade dinâmica é necessário para encontrar o momento ideal. Isso complica o problema, pois essas restrições de viabilidade podem se tornar altamente complexas ao voar em alta velocidade.
As manobras são influenciadas pela dinâmica do voo , mas também por hardware e software para controlar e estimar o estado do sistema . O conjunto resultante de restrições de viabilidade com memória (ou seja, que também levam em consideração voos feitos anteriormente) não pode ser facilmente incorporado em um planejador de voo típico por duas razões principais.
Primeiro, as restrições de viabilidade não são facilmente expressas de uma maneira conveniente, por exemplo, como restrições em um conjunto admissível de entradas e estados de controle. Em vez disso, a viabilidade da trajetória deve ser considerada holisticamente. Em segundo lugar, na maioria dos cenários, a modelagem precisa dessas restrições só é possível por meio de experimentos do mundo real.
Esses experimentos são arriscados e potencialmente onerosos, uma vez que o processo, que visa melhorar a compreensão de como a aerodinâmica de alta velocidade pode afetar os drones em vôo, envolve inúmeros experimentos de laboratório, nos quais freqüentemente ocorrem colisões e, portanto, destruição total ou parcial . Na verdade, esses experimentos acabaram sendo particularmente caros. Por esse motivo, o algoritmo da equipe do MIT visa minimizar o número de experimentos necessários para identificar rotas seguras e rápidas para um drone.
A novidade do algoritmo
Muitos esquemas de otimização de trajetória dependem de um grande número de avaliações. O algoritmo criado pelos engenheiros do MIT, por outro lado, utiliza uma técnica de otimização multi-fidelidade capaz de aproximar as restrições de viabilidade do sistema com base em um número limitado de experimentos. Ele usa um modelo de caixa preta do processo Gaussiano (GP) para classificar as trajetórias candidatas como viáveis ou não viáveis e, portanto, é capaz de planejar trajetórias cada vez mais rápidas à medida que o modelo é aprimorado.
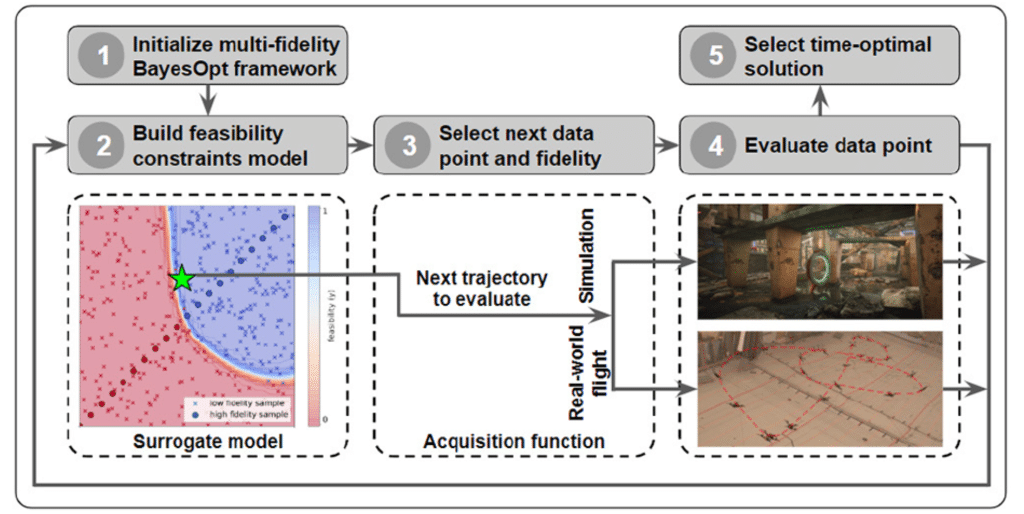
Os estudiosos do MIT, portanto, propuseram modelar as restrições de viabilidade do quadrotor e para a geração de trajetórias com tempo ótimo. Tudo isso foi possível graças ao uso de um algoritmo de classificação GP multi-fidelidade que pode incorporar avaliações de aproximação analítica, simulação numérica e experimentos de vôo no mundo real, projetando um processo de aquisição especificamente adaptado à robótica experimental. A função de aquisição leva em consideração o custo adicional de avaliações inatingíveis, pois estas podem representar uma ameaça para o veículo e seu entorno.
Os experimentos realizados no MIT para treinar o drone
Os primeiros experimentos realizados foram capazes de simular o comportamento de um drone em um vôo na presença de obstáculos virtuais. Milhares de cenários diferentes com rotas e velocidades de vôo diferentes foram então simulados.
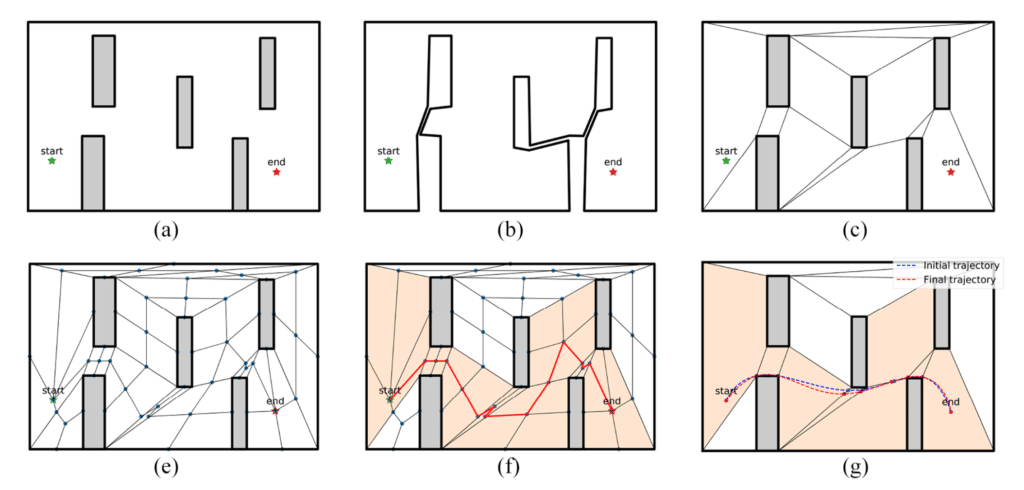
Para demonstrar a abordagem, a equipe disse que simularam um drone voando por um caminho simples com cinco obstáculos quadrados deslocados um do outro. Eles montaram a mesma configuração em um espaço de treinamento físico e programaram um drone para voar pelo percurso em velocidades e trajetórias identificadas por suas simulações. Eles também executaram a mesma rota com um drone treinado em um algoritmo mais convencional que não incorpora experimentos em seu planejamento.
O drone treinado no novo algoritmo “venceu” todas as corridas , completando o percurso mais rápido que o drone treinado convencionalmente, em alguns casos, terminando o percurso 20% mais rápido que seu concorrente, apesar de uma largada mais lenta.
Perspectivas futuras
Os pesquisadores planejam fazer mais experimentos, em velocidades mais altas e em ambientes mais complexos, para melhorar ainda mais o algoritmo . Eles também serão capazes de incorporar dados de vôo de pilotos humanos dirigindo drones remotamente, cujas decisões e manobras podem ajudar a focar em planos de vôo mais rápidos, mas ainda viáveis.
Artigo por Giorgia Pascale
O artigo do MIT, o primeiro drone capaz de evitar obstáculos mesmo em altas velocidades, vem da Tech CuE | Engenharia de Close-up .
